超精密機械要素
Walking Driveに基づく超精密位置決め装置の開発
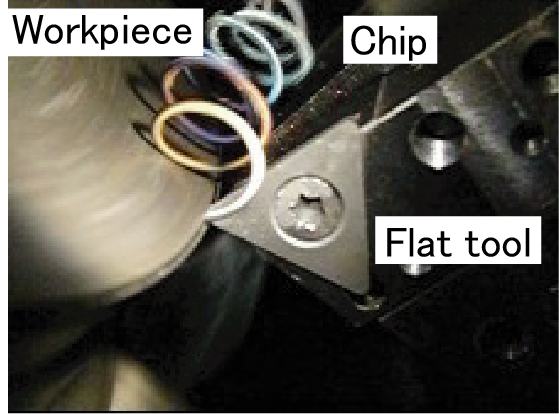
人間の歩行動作に類似した駆動原理(Walking Driveと呼ぶ)を考案し,圧電素子の微小変位を利用して長ストロークにわたる滑らかな送り運動と超精密位置決めを実現している. ナノインプリント,WOW,MEMS接合技術といった超精密アライメント・プレスに適用するため,高耐荷重型装置を開発し,1tの耐荷重と測定分解能に等しい位置決め分解能(10nm)を両立し得ること等を確認している.

進行波を利用した非接触流体軸受の開発
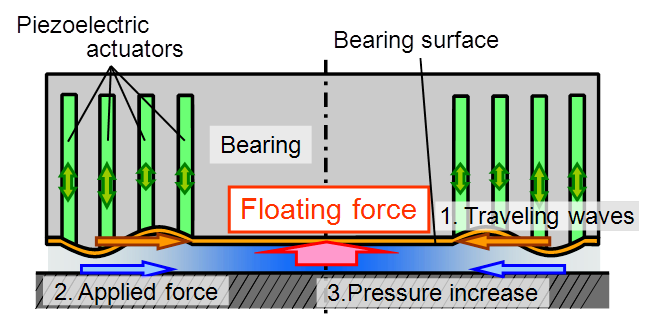
軸受(案内)は,多くの機械の根本的な部分を構成する機構であり,主に可動部における摩擦低減を目的として利用される. 本研究では,従来とは異なる原理に基づく軸受として,進行波を利用した非接触流体軸受を提案している. 本軸受では,軸受面に外周部から中心部へ向かう進行波を発生させる. この時,軸受面-案内面間(軸受隙間)内の流体は,進行波の進行方向へ駆動力を受ける. これにより中央部における軸受隙間内流体圧力が上昇し浮上力を得る. 本軸受の特徴として,非接触支持のため摩擦が極めて小さいこと,外部に流体供給装置が不要であること,電気的に制御が可能なことが挙げられる. また,進行波の方向を逆転することにより吸着力を発生させることもできる.これまでに,進行波軸受の試作機を開発して駆動実験を行い,非接触による滑らかな移動を確認している.
表面張力を利用した非接触流体軸受の開発
精密な送り装置等において,軸受はその機械全体の性能を大きく左右する要素の一つである. 本研究では液体の表面張力を利用した新しい流体軸受の提案を行っている. 提案する軸受では,例えば十?m程度のわずかな軸受隙間に水などの液体膜を作り,表面張力によってその状態を維持し,案内面の滑らかな移動を可能にする. この流体は軸受隙間に保持されるため,基本的には常に供給し続ける必要はなく最初に供給するだけで軸受の機能を果たす. そのため,従来の静圧軸受と比較して,コンプレッサや配管などの付帯設備を必要とせず,単純な構造・安価・使用場所に制限されないなどの利点を持つ. また圧縮流体における流体の脈動による微振動の問題も原理的に発生しない.